每個廠家在介紹
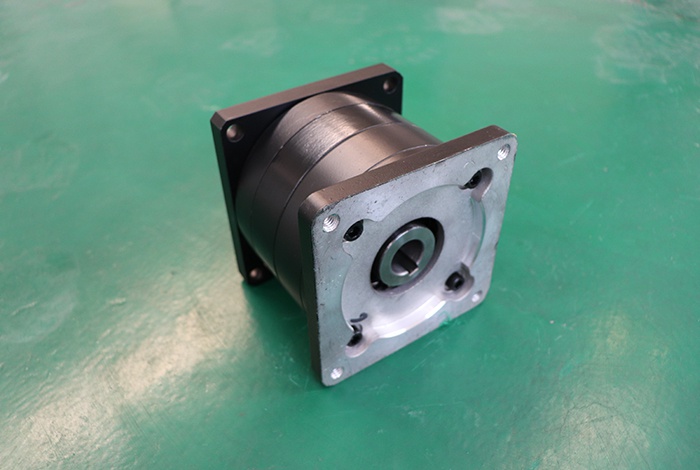
伺服行星減速機的特點的時候,都會說到它具有傳動效率高、精度高等特點。用戶在表達自己需求的時候,也會說到精度。但是這個“精度”具體是指的什么呢?相信了解的人并不多,我們通過以下的內容來了解一下這方面的知識:
1、角度傳達誤差(也叫運動誤差/運動精度):
角度傳達精度表示在輸入端施加任意轉角時,理論旋轉輸出的角度和實際旋轉輸出的旋轉角度之差。什么樣的設備對伺服行星減速機的角度傳達誤差有要求呢:單一方向,持續運轉的設備對角度傳達誤差有要求,比如模切機/印刷機的拉料系統。
2、重復定位精度:
重復定位精度是指重復7次在任意位置上同向定位,測定輸出軸的停止位置,求差。測定值用角度表示,表示為±差的1/2。
3.回程間隙:
也稱作背隙,單位:弧分(ARCMIN),指伺服行星減速機輸出軸與輸入軸的偏差角,將輸入端固定,使輸出端順時針和逆時針方向旋轉,當輸出端承受正負2%額定扭矩時,減速機輸出端有一個微小的角位移,此角位移即為回程間隙,背隙出廠初始值為3弧分以下(P0精度特殊品1弧分以下)。
可以看到伺服行星減速機的精度指標包括回程間隙、角度傳達誤差、重復定位精度三項。通過文中內容我們也可以發現不同的設備對于減速機的精度指標要求也是不同的,所以大家有必要了解一下這方面的知識。


 魯公網安備 37030402001641號
技術支持:淄博歐凱
魯公網安備 37030402001641號
技術支持:淄博歐凱